Special thanks to Shahrier Erfan Harun for this story!
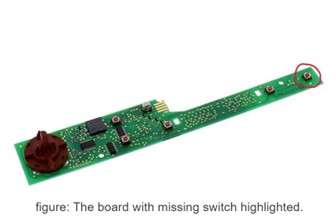
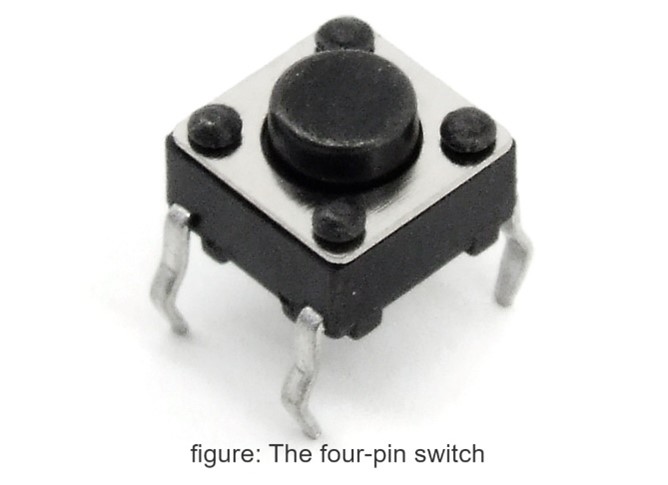
I have a Hoover washing machine that is an essential part of my daily life. Unfortunately, a few days ago, I accidentally broke the switch on the machine’s board, and now it won’t turn on. The board has a four-pin switch that is responsible for turning on the machine when pressed. I tried everything I could think of to fix the problem, but nothing worked. To make matters worse, the board is not available on the market, and buying a new washing machine is not an affordable option for me.
Luckily, I remembered that the Fab Lab has an Electronics Lab, and I decided to take a chance and see if they could help me. I explained the problem to Jonas, a staff member at the Fab Lab, and he was confident that the board could be fixed, but we needed to have the four-pin switch to do so. He then explained how the board works and how the switch is responsible for opening and closing DLD gates to make the machine run.
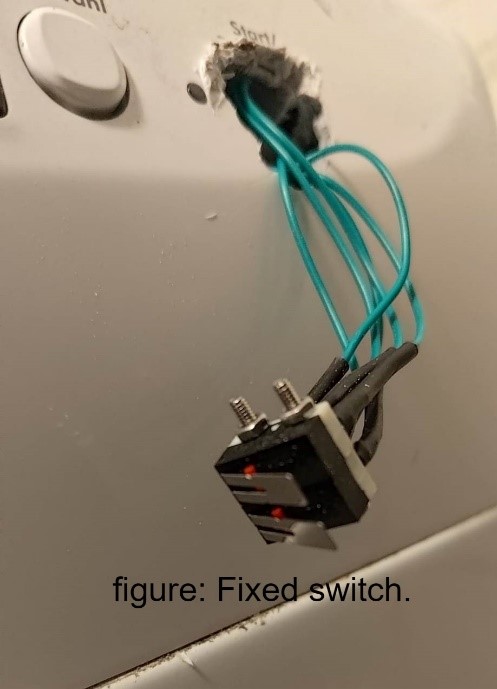
Unfortunately, we could not find the exact switch in the lab. However, Jonas found two switches that work together as a four-pole switch. We soldered the pins and wires together and connected the new switch to the board. Now the board has a switch that works the same as the original four-pole switch.
I connected the board back to the machine and turned it on, and to my surprise, the machine started working again! I was delighted that my washing machine was up and running without the need to buy a new one.
This experience taught me a lot about how these types of boards work, and it gave me confidence that I can fix other machines in the future. I am grateful to Jonas for his help and expertise in solving my problem, and I highly recommend the Fab Lab to anyone looking for a place to fix their machines or learn about electronics.
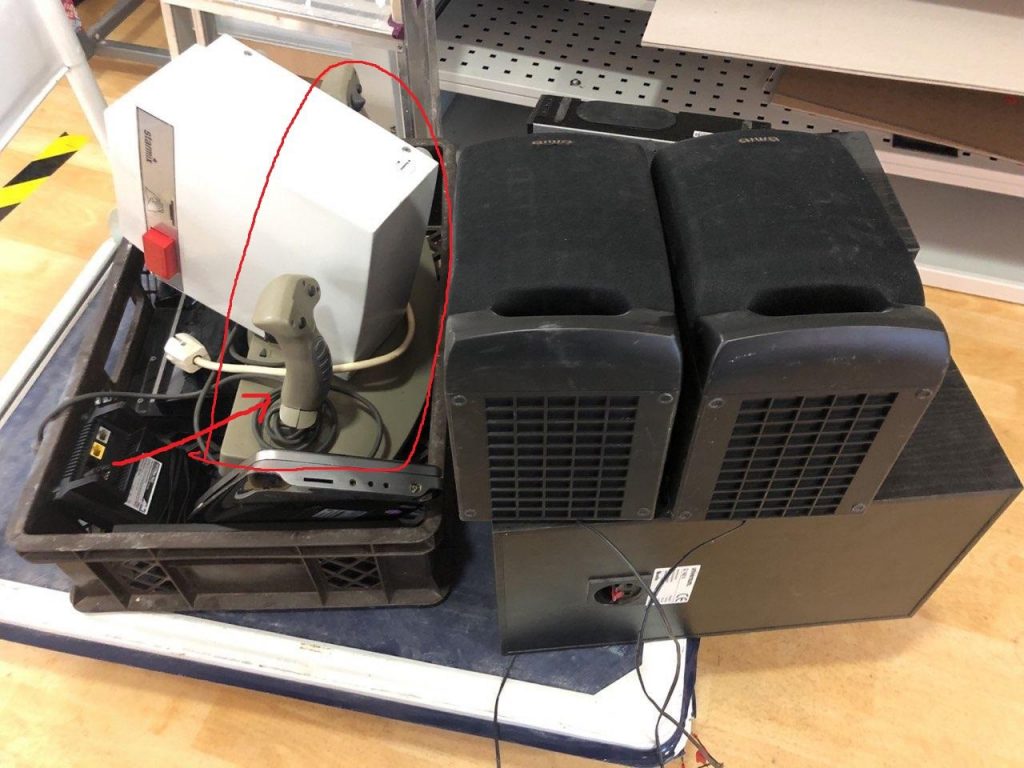
My father bought the thing at the flea market sometime. The price of 5 rubles (Ц. 5Р.) is incorporated in the handle, because at that time in the Soviet Union there was the planned economy and you could get a pack of butter for the same price in the big whole country.
Problem
The drill always did its job. It is particularly suitable for small jobs and you can dose the torque manually. Only at some point the drill got stuck somewhere and my father exerted too much momentum on the big bevel gear until a few plastic teeth sheared off, rendering the thing useless. The old bevel gear consisted of two parts: The front side with the teeth was made of a plastic casting and the back side was made of some kind of metal, which was somehow connected to the plastic (unfortunately no photo). So a new bevel gear was needed.
Solution
First, the teeth of the bevel gear had to be counted. There are 60 teeth. The driven bevel gear has 15 teeth, so there is a ratio of 1:4. In addition, all dimensions, such as the height of the teeth, their width and the bore diameter of the bevel gear had to be measured with a caliper gauge. The problem: the teeth are not simply arranged in a straight line, and their “focal point” is somewhere in the air. They are also wider at the outermost diameter than at the inner diameter of the bevel gear. So the geometry is a real challenge and you can’t just build the thing with a CAD program if you’re not a professional.
But what to do? Fortunately, I happened to come across a solidworks tutorial on the internet. It shows how to create configurable standard parts using the solidworks (SW) design library. And that worked well!
Procedure
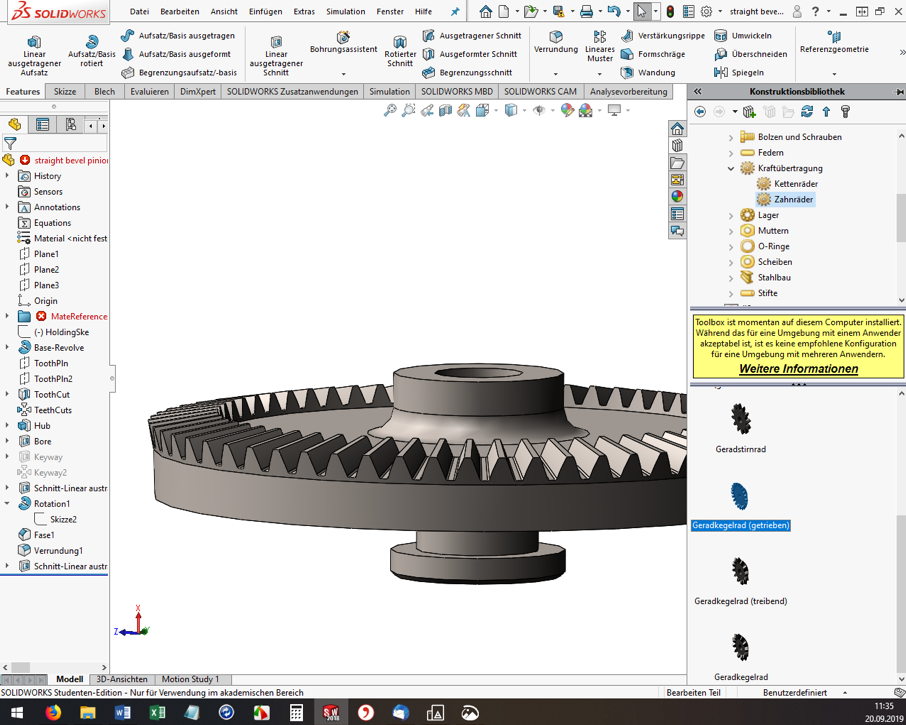
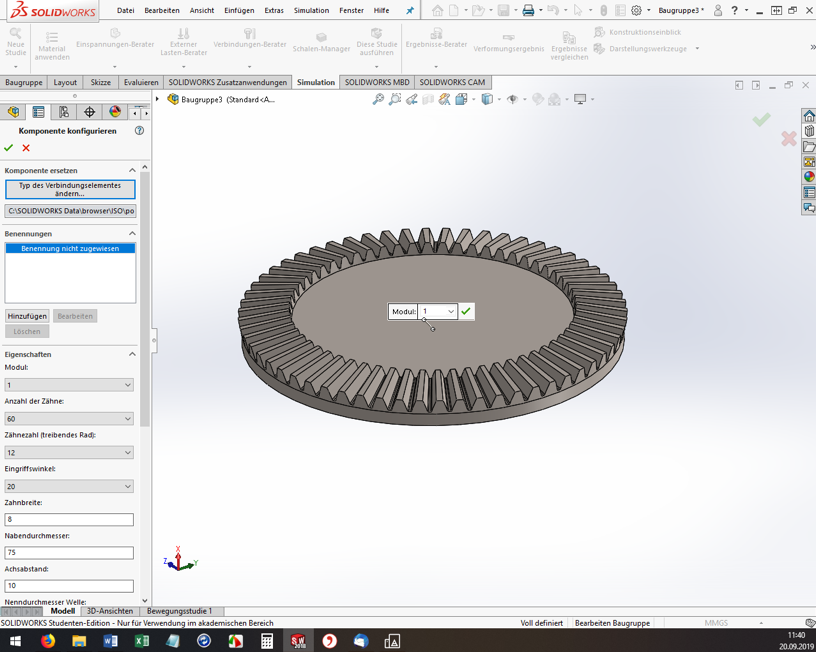
Open Solidworks, open any assembly and throw out all the parts. Somehow it didn’t work out any other way for me. Then, on the right side of the screen, open the construction library and shimmy through the tree. Toolbox, ISO, power transmission, gears, degree bevel gear (driving).
For me, the ISO standard matched well with my Soviet part. Then the “Degree bevel gear (driving)” must be dragged and dropped into the assembly window. Now the “Configure component” dialog opens on the left. The module, the number of teeth, the pressure angle, etc. can be set. Here you have to experiment, have the bevel gear with the green check mark built again and again and measure it. (Tip: If you click on a component edge, the bottom info bar of SW conveniently shows the measured length directly).
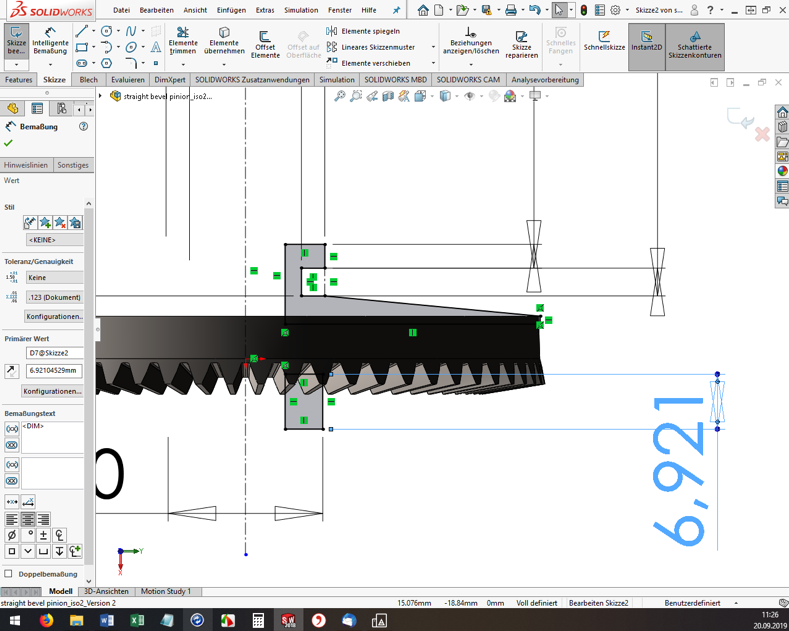
However, you cannot specify all dimensions and geometry properties in the configurator. And here’s where it gets a little tricky. If the tooth geometry of the blank created fits so far, the rest must now be added manually. I used the function “Attachment/Base rotated” to build a created sketch as a body of rotation to the blank (see screenshot). Again, I had to measure the old bevel gear over and over again.
Once you are satisfied with the part, you need to export it to *.STL format for 3D printing. And off we go to the Fab Lab Siegen! Here Fabian helped me out, showed me the 3D printers and started the printing. Thanks a lot! 😊
Result
The first print was unsuccessful (of course). In 3D printing, for example, the holes are always slightly smaller compared to the model. The teeth were also too small, so that they could not engage deeply enough with the opposing teeth. These teeth also sheared off during initial attempts. In addition, the bracket for the crank was a bit too thin and is therefore broken off.
But now it was possible to measure the printed bevel gear and improve the dimensions in SW and finally start a second attempt. However, the second time it went better than expected and the bevel gear installed beautifully. The hand drill runs very smoothly and if any problems should occur in a few years, I’ll just print out the bevel gear again 😉 .
In the last two days I have been working on retr0bright and I don’t want to withhold my experiences from you. I’m currently retrofitting this old Playstation 2 controller and was actually going to limit myself to the inside, but now I’ve decided to give the controller a bit of a facelift on the outside as well.
However, the primary goal was not to make the controller look nicer again, but to simply have retr0bright done. So I looked around in this internet how retr0bright works and what you need for it. You can find many different recipes and procedures. All involve hydrogen peroxide (H2O2) solution 👨🔬 and (UV) light. I was inspired by this video first and decided on the H2O2 and heat variant:
For this I bought a 3% hydrogen peroxide solution. You can get them for a few euros at Müller or Amazon. To test the procedure, I first performed a small test. There were two parts on the controller that had to be replaced due to damage and could therefore be used as a test and reference object. Before the test, I removed the protection from the parts.
For the H2O2 & heat variation, I mixed the H2O2 with tap water in about a 1:2 ratio and heated it to about 60°C in a pot, then let the first part float in the solution for four hours. Even though no additional light source was used in the video, I still decided to shine a lamp into the pot. Since other tutorials keep saying that the best results can be achieved with ultraviolet light or lots of light in general, I took the brightest/intensive lamp I had there. This is a 50W high power LED which is normally used as plant lighting. But I can’t tell you exactly what wavelength comes out ¯_(ツ)_/¯.
After four hours, I then took the part out of the solution and could perceive a visible brightening, with which I was satisfied.
So in go the next parts. Since I had bought only a small bottle of H2O2 (250ml) and accordingly there was not so much liquid in the pot, I first put in only the front sides of the joysticks, since they are somewhat flatter. Important: the parts should be completely covered. After four more hours, I took out the fronts of the joysticks and compared them to the backs.
I treated the backs using the same process, but I had to improvise a bit because I didn’t have enough of the hydrogen peroxide solution to completely cover the backs. So I decanted the solution into the jar and added some more water and then heated the solution by water bath. This time I couldn’t set up the lamp properly, so I left it out.
After another four hours, I got the parts out. The whitening was much less than the other pieces, so I just let them float in the solution for another three hours. Unfortunately, this did not bring so much.
Black gloves = professional.
Since the actual controller housing is way too big for my pots, I used a different variant here. For large housing parts, the Internet recommends the use of hydrogen peroxide gel. In this process, hydrogen peroxide is mixed with glycerin (among other moisturizing properties) and xanthan gum (E 415, thickening agent). Alternatively, you can use Oxide Cream from the hairdresser: https://www.amazon.de/Cream-Oxide-1000ml-12/dp/B008F5MIL6/ (see reviews).
The procedure here is as follows: The part to be bleached is evenly coated with the gel and then, if possible, wrapped airtight (zip lock bag or cling film) and placed in the sun or under a lamp for about 24 hours. Wrapping is to prevent the gel from drying out too quickly.
The aluminum foil serves only as protection for the table. Then quickly built a bracket for the lamp 👨🔧.
After about 24 hours, I then freed the case from the cling film and washed it properly. It has become brighter, but unfortunately not as much as the other parts.
BeforeAfter
I also put the backs of the joysticks under the lamp overnight. In the morning, the parts looked like this:
A photo series was created from a plaster face mask.
A point cloud from the photo series was created with Linux/Colmap.
The points were cleaned up and processed with Meshlab
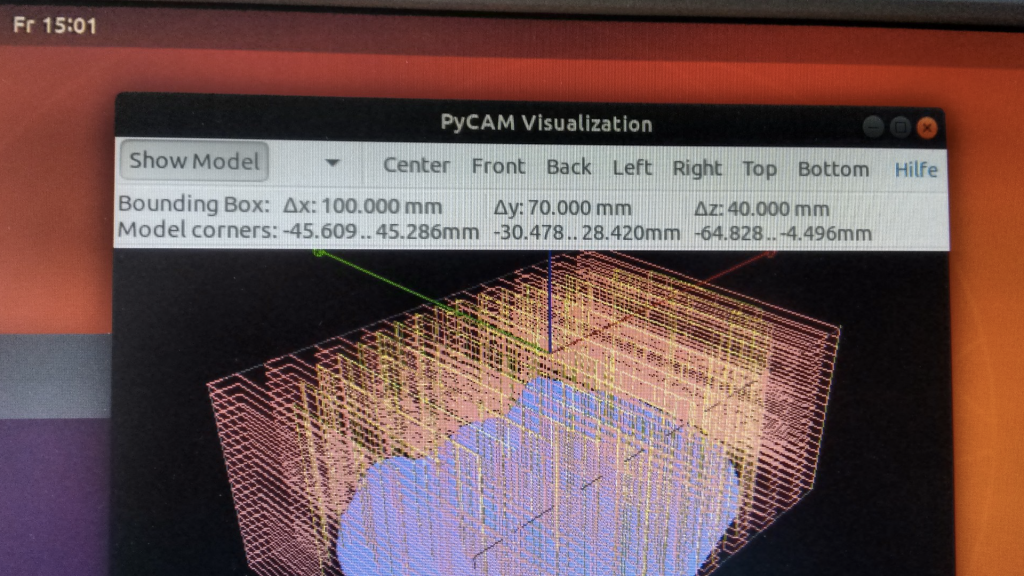
The milling paths were generated with Pycam.
The toolpath files were created with a tool developed in-house.
simplified so that the GCode can be run with the Fablab CNC software as well as NCcad.
The workpiece: a 1 1⁄2 year old, dried piece of end-grain wood, pre-drilled for “spaxing” onto the sacrificial plate.
Cutter: 6 mm cylinder for “roughing” and 6 mm spherical head for “finishing”.
About The Manufacturing Process
The feed rate for milling could be increased significantly. The cutter length was not sufficiently taken into account during the creation. This is how the saying of the day came about: “One more delivery is possible”. Before any collisions occurred, it was stopped. After remodelling and x-times finishing (Proxxon), the following emerged:
This project was kindly supported by the University of Siegen. Many thanks for this, especially to Daniel for his collaboration and Helga for text drafting and layout.
Remark: Only a very slow Linux notebook (Ubu 19.04) is available on site. (possibly faster with SSD or cloud computing ??) Network access for updates planned. Friday afternoons are aggravating and not so well suited for such projects with public traffic and the limited time of the staff. Other spax screws are missing or have not been found. The cutter selection is limited. Unsolved : Chatter marks.
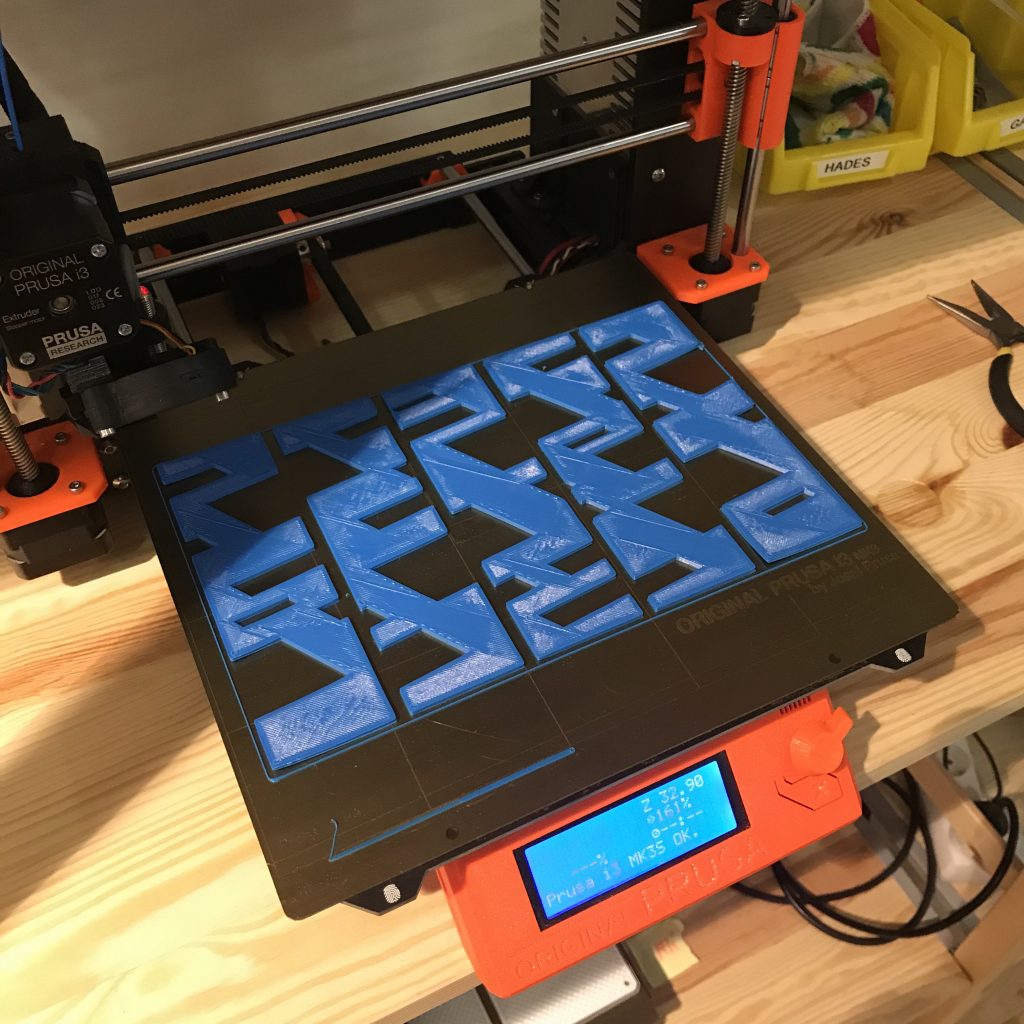
On the evening of that December day in 2019, I held in my hand the first copy of a 3D print of one of my designs.
I have been working artistically with multipart images and objects since the 90s and was looking for a method to transform a design into a sculptural object from the 3D printer.
Members of Fab Lab Siegen accompanied me in several steps: From the basic information about the Fab Lab and its possibilities, the ways of designing from “my” graphics programme via CAD programmes to the printer control, a lot was new for me. But in the great working atmosphere it was fun to get involved with new things.
Now the new object hangs provisionally on the wall, for “test viewing”, so to speak. I am concerned with the mechanisms by which our perception “sees” something as a whole with the help of partial information. The quality of visual information, redundancy, the “information gap” – such terms run through my head.
Here in the work you can see how, despite the distances between the stripes, the impression quickly arises in many places that rectangles, seen in perspective, are being depicted there. The gap suddenly becomes information. With David Amend at the end of the day, I got to talk about how the exact same thing is happening with fake news, an area in which he had experience from a computer science perspective. This is how fragments become a narrative and how easily “truth” emerges in our minds. That brings me back to my artistic theme.
If you want to go a little deeper, you can find more material on my blog.
If you want to experience more art in Siegen, please refer to the ChaosFlux from 24-26 April. Mehr Infos: https://chaosflux.de/de/about/
In archery, the repeatability of the entire shooting process is
crucial for a good result. I myself have owned an Olympic recurve bow with sights (aiming device) and stabilization system (weights for balancing, for smoother aiming) for several years.
Characteristic of this type of bow are the curved or backward bent ends of the bow, from where the English term “recurve” comes.
Unlike other shooting sports, where, for example, is shot over the rear sight and front sight, the sight of the recurve bow has only the front sight. Thus, the body posture and the stopping point of the bow (anchor point) form the second reference point of the recurve bow to define the direction in which the arrow flies. That is, even if the front sight always points to the gold (center of the target), but the bow is slightly different in your hand than it was when you shot it before, the arrow will hit somewhere else.
Therefore, many archers customize the grip of their bow with grip tape or modeling clay to craft a grip that is perfect and stable in their own hand. Since I was not satisfied with the grip of my bow, I decided to design my own grip, which also looks professional due to 3D printing.
Attempts to apply known knowledge
Before I designed the grip according to my ideas, I first wanted to copy the original grip of my bow, so that I could make the adjustments that seemed reasonable from this basis.
Due to my mechanical engineering studies at the University of Siegen, I am familiar with the use of CAD software and have confidently approached the design. However, two things caused me an unexpected amount of problems.
First, it took me a long time to design the many interlocking fillets of the handle. These fillets are very difficult to reproduce with software solutions from the mechanical engineering sector, since they usually have defined geometries. This took me some time, but also forced me to learn new features and capabilities of CAD software.
The second issue that cost me a few tries in 3D printing is the measurability of the hard-to-define geometries.
Since the handle has only a very narrow, straight edge, it was very difficult to measure the position of the hole, bevels and radii. However, it is important for the attachment of the grip piece to the sheet that the geometry of the grip piece corresponds exactly to the geometry of the receptacle provided for it on the sheet. Since I could only roughly estimate many dimensions, I had to approach the correct geometry step by step through trial and error.
During this trial and error, I was able to learn a lot about 3D printing from the staff and makers in the Fab Lab. Above all, they helped me find the ideal slicer settings for my part and the right material. In addition, the Fab Lab works with different CAD programs, all of which have their strengths for different problems.
Prototyping
After four attempts I had copied the original grip of my bow sufficiently well and started with attempts to adapt the grip geometry to my hand. In the process, I tried a total of five different versions.
First, I made changes that seemed logical to myself to stabilize certain areas of the hand to prevent it from slipping back and forth. On the other hand, I combined this with geometries of grips from different manufacturers to arrive at my individual and optimal grip.
Currently, I have mounted a version of the grip on my bow, in which I have rounded some disturbing edges of the original grip and minimize the back-and-forth slipping by changing the angle of the contact surface.
Satisfied, but surely there’s more?!
I definitely achieved my goal of getting a better grip than the old one. Whether I have already found the ideal solution, I do not know, because there are still some geometries that I could try.
In the meantime, I uploaded the latest version of the grip to Thingiverse and hope to run into an archer who also uses my grip. Overall, I have to say that through the exchange in the Fab Lab I got ideas and tips that I would never have come up with on my own.
When I entered the Fab Lab for the first time in November, I was really amazed that there was such a great place here in Siegen. The people were very nice and open-minded and I felt comfortable right away. I guess it’s also because I’ve always been a bit of a technology nerd.
An Idea is Quickly Found
The 3D printers have aroused special interest in me. Not only because it was exciting to watch them work, but also because I am somewhat involved in 3D modeling as a hobby. Over the next few weeks, I was at Open Lab every Friday. There I met many nice, interesting people who were all working on great projects.
I think creativity is somewhat contagious. Therefore, it did not take long and I had also decided on my first project:
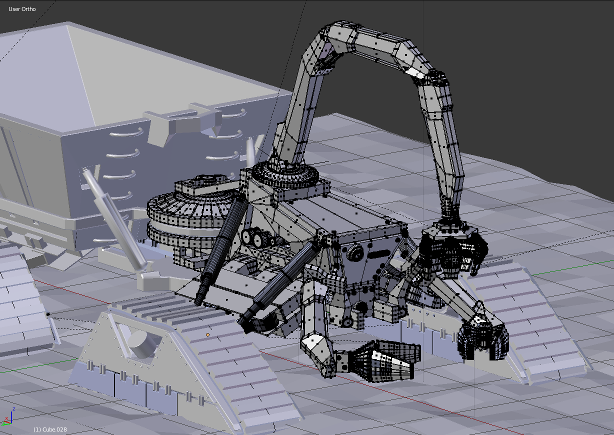
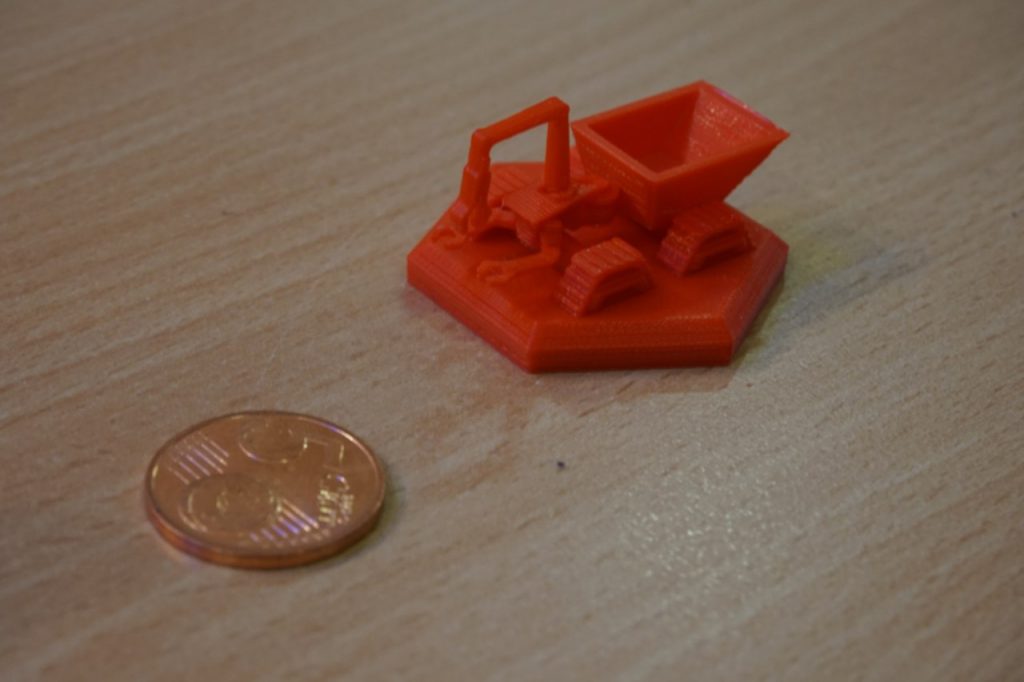
i wanted to create a tabletop game, model all the game pieces myself and make them with a 3d printer.
Since I had just rendered a great picture (see below) of a “MechMiner” for a science fiction contest, I took it directly as a template for my first figure, the “resource collector”.
The Right Manufacturing Process
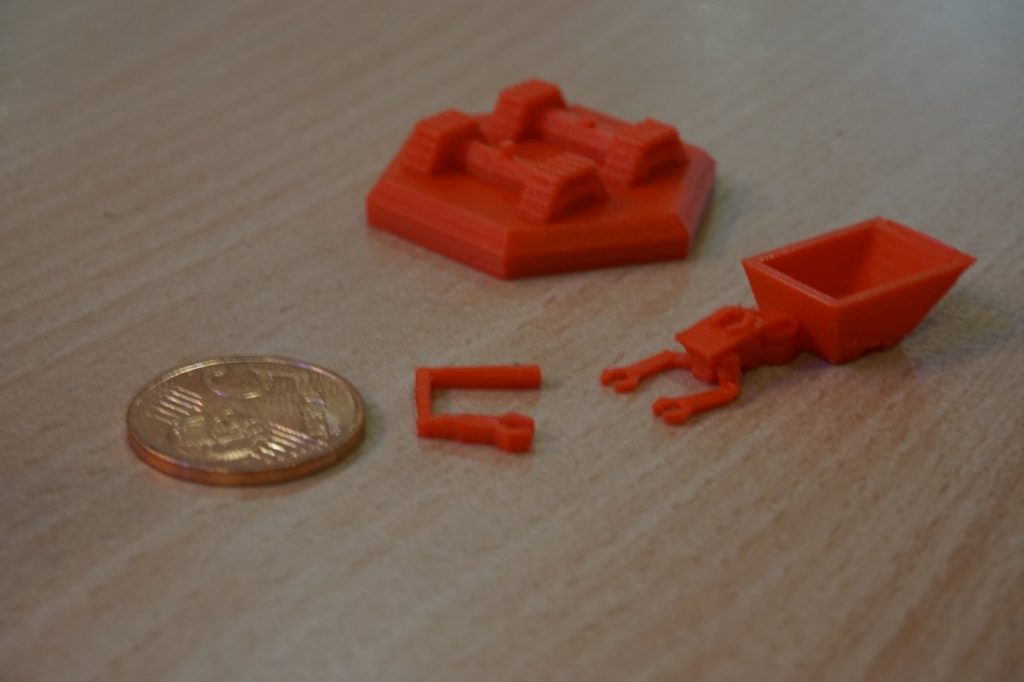
Then I just started modeling. In doing so, I often reached the limits of the FDM printing process due to the small dimensions of my figures and the many details in the 3D models. Therefore, I considered a modular plug-in system to be able to print as efficiently and detailed as possible. I was offered to use an SLA printer, which has much higher precision, but dealing with resins and other liquids is not really my thing.
Build, Build, Build
With most problems, both in modeling and in manufacturing, someone was always ready to help me. Since the laser was a little more complicated to use than the 3D printers, I was also quite happy about it.
Since the laser was a little more complicated to use than the 3D printers, I was also quite happy about it. This one was perfect for making a nice modular game board. At the moment the game is not finished yet, so here you can see only a prototype for testing the game mechanics.
It will be some time before the first version can be played. Balancing will take a long time, and there are still many game cards to be designed.
I have already put the 3D models into a Github project. Stay tuned!
And Around It: The Lab
I myself could also help some people with their projects with my knowledge, and it makes me a bit proud :). I think coming together and working with like-minded people is what makes Fab Lab such a great place.
The technical competence of the staff is high and they do their work very professionally.
The Lab provides opportunities for everyone to try out technology. And I definitely found some people there that I would call friends.
In the meantime, I own my own 3D printer to move the project forward. Thanks again to everyone who helped set up and troubleshoot!
In my opinion, a place like the Fab Lab is an enrichment for Siegen. I just don’t understand why so many people walk past it. 😮 Anyway, I’m looking forward to spending more time there.